

労務費の高騰や人材不足により、製造現場や物流現場の人材確保が非常に難しくなっています。
しかも、中長期的に考えて日本の人口は減る一方のため、労働人口の減少は避けられません。
そこで現場の省力化のため、まず産業ロボットを検討するでしょう。
しかし、現場の作業規模や導入コスト、設置スペース等の問題があり、産業用ロボットはハードルが高いものです。
一方、協働ロボットなら産業用ロボットの問題点をクリアできます。
しかし、設置された場所の作業しかできないため、人間のようなフレキシブルな対応はできません。
そこで、提案するのがAGVと協働ロボットをミックスさせた自動搬送ソリューションです。
低コストで省人化を実現するだけでなく、フレキシブルに作業できるのが特徴です。
これらを活用した自動運搬ソリューションの様子をご覧ください。
■メリット
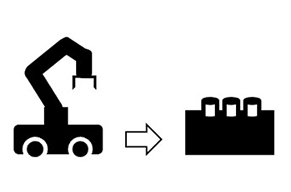
見栄え良好、レイアウト変更最小
■デメリット
導入コスト高、AVG・協働ロボットの同時稼働不可
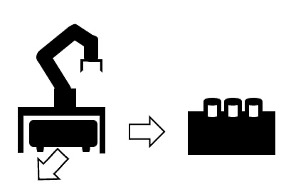
■メリット
AGV・協働ロボットの台数最適化、工程レイアウトの変更最小
■デメリット
AGV・協働ロボットの通信や充電、そして連結が必要
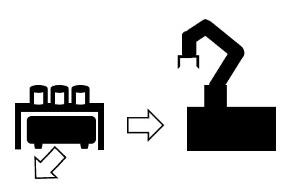
■メリット
AGV・協働ロボットの台数最適化、開発の工数・難易度最小
■デメリット
導工程レイアウト(搬送路・ワーク供給)の大幅変更が必要
✕ AGV+ロボットの案では、いずれかの非稼働時間の存在が大きなデメリット
✕ AGVが作業台を運搬する案では、工程レイアウトの変更が大きなデメリット
◎ AGVがロボットを搬送する案のデメリットは、テックマンロボットで解決可
山善は、AGVが協働ロボットを自動搬送する方法を採用!

AGVは協働ロボットを所定の位置に置くと、ロボット搬送の役目を一旦終えます。
その間、別の運搬作業をすることで、AGVを効率よく使えます。
そして、協働ロボットの作業が終了した後、次の作業を行うため、ふたたびAGVが協働ロボットを搬送します。
このように運用する事で、AGV・協働ロボットそれぞれの能力を、余すことなく運用できます。
一般的な協働ロボットの場合、一定以上の精度が求められる作業をするために、別途カメラの設置が必要です。
しかし、テックマンロボットには標準でカメラがついています。そのため、標準ソフトを用いて簡単に、追加費用をかけずにカメラを設定できます。
カメラで専用のランドマークを読み取ることにより、簡単に位置補正できます。そのため、ミリ単位以下の精密な作業を精度よく再ティーチングを行わずに運用が可能です。
AGVの走行経路には、仮置き中の商品や作業中の人など、AGVにとって予期せぬ「もの」があります。
しかし、AGVは走行経路上の障害物を検知ことで、その場で走行経路を変更して自律的に走行できます。
バッテリ容量が低下した場合には、自動的に充電器まで移動して充電するため、手間もかかりません。
また、テックマンロボットが様々な通信方法に対応しているため、PLCなしで簡単にAGVと通信可能です。
| カテゴリー | 項目 | パラメータ |
|---|---|---|
| 基本スペック | 寸法 | 800*619*330 mm |
| 本体重量 | 180KG | |
| 回転直径 | 940mm | |
| ナビゲーションモード | レーザー SLAM ナビゲーション/ハイブリッドナビゲーション | |
| 最大積荷負荷 | 300Kg | |
| 最大速度 | 1.5m/s 積載なし;1.0m/s 満載 | |
| 標準速度 | 1.2m/s 積載なし;0.8m/s 満載 | |
| レーザーSLAMナビゲーション位置決め精度 | 位置決め精度:±10mm;停止角度精度:±1° | |
| 基本性能 | ハイブリッドナビゲーション精度 (QRコード又は反射シールが貼っている) |
位置決め精度:±5mm;停止角度精度:±1° |
| パス計画 | 視覚トラッキング/自主パス計画 | |
| リフト方式 | 360°回転&リフト;最大ストローク高さ:60mm | |
| 駆動方式 | 駆動輪が2つ | |
| バッテリータイプ | リン酸鉄リチウム,48V,30Ah | |
| バッテリー | バッテリー寿命 | サイクル≥2,000回;DoD≥80% |
| 連続稼働時間 | ≥8H | |
| 安全バンパー | 360°カバー | |
| 安全装置 | 非常停止ボタン | 本体両側に2つ |
| 環境温度 | 0°C-40°C,結露無し | |
| 状態指示ランプ | ロボットの周囲の位置に取り囲む |
| TM12 | |
|---|---|
| ロボットスペック | |
| 負荷重量 | 12kg |
| 最大リーチ | 1,300㎜ |
| 速度 | 1.3mm/SEC |
| カメラ | 2Dカメラ |
 AGVの最大積載荷重はどれくらいででしょうか。
AGVの最大積載荷重はどれくらいででしょうか。
 300kg・1000㎏タイプのAGVをご準備しております。
ロボットはTM12以外でも搭載可能でしょうか?
ご要望に合わせてカスタマイズ検討させて頂きます。カスタマイズにも対応可能でしょうか。
ご要望に合わせてカスタマイズ検討させて頂きます。何台まで制御可能でしょうか。
台数制限はございません。
300kg・1000㎏タイプのAGVをご準備しております。
ロボットはTM12以外でも搭載可能でしょうか?
ご要望に合わせてカスタマイズ検討させて頂きます。カスタマイズにも対応可能でしょうか。
ご要望に合わせてカスタマイズ検討させて頂きます。何台まで制御可能でしょうか。
台数制限はございません。
自動化設備についてのご相談は、下記フォームに必要事項を入力してください。
入力後、確認ボタンを押してください。