ねじ締め自動化ソリューションナットランナ×協働ロボットによるねじ締め作業の自動化


ねじ締めは部品締結において非常に重要な作業です。ねじ一本の緩みが機器の性能や安全性に大きな問題を及ぼすこともあります。
ねじ締めは重要な作業である一方、人間にとってあまり生産性のある作業と言えない一面もあります。
そこで、ねじ締めを自動化して、品質向上と生産性向上を同時に実現する「ねじ締め自動化ソリューション」をご提案します。

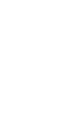
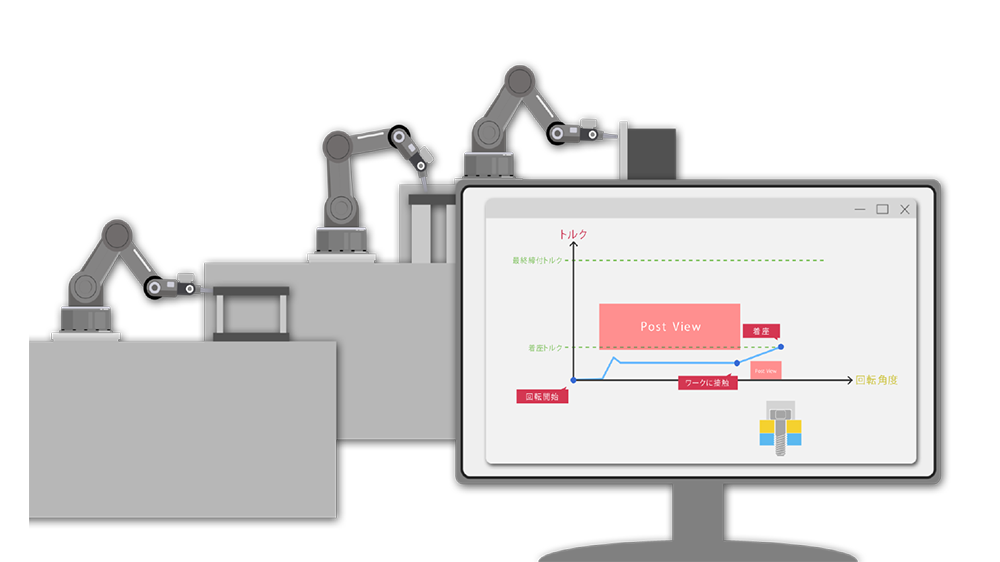
ナットランナとはねじ締めを行う工具のひとつです。トルク(0.0125N〜8,000N)と回転角を同時に管理することで、適切なねじ締めを実現します。
ねじ穴の位置ズレ時に発生する基準値よりも高いトルクや、異物混入によるねじ浮き時の回転数不足なども検知できるため目視検査の廃止に繋がった例もございます。
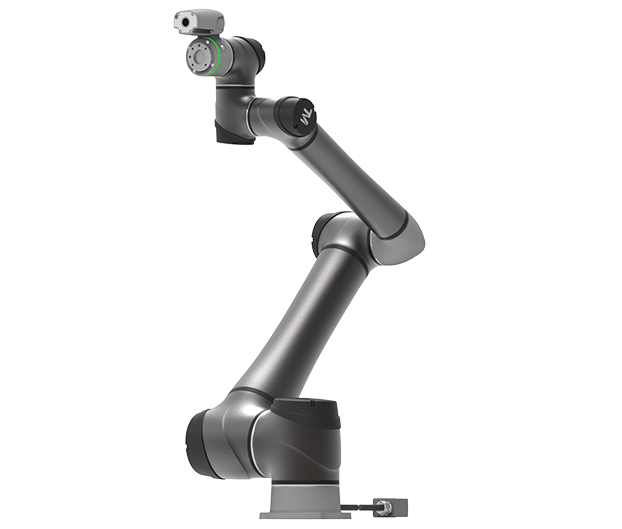
テックマンロボットとは、高い汎用性と安全性を兼ね備えた協働ロボットです。 産業用ロボットと異なり、安全柵なしで人と同じ空間で作業できるのが特長です。また、カメラが内蔵されていることも特徴です。
テックロボットにはさまざまなラインナップがあり、重量物運搬のような作業だけでなく、ねじ締めのような正確性が求められる作業にも対応可能です。
ねじ締め作業そのものは非常に単純です。そのため、ねじ締めの回数が多くなると、作業者によっては品質にばらつきが生じる恐れがあります。また、熟練者であっても業務上の問題を抱えて考え事をしているなど、作業品質に影響を及ぼす可能性もあります。
しかし、ねじ締め作業を協働ロボットに行わせることで、いつでもどのような状況にあっても高品質なねじ締めが可能です。また、ねじの締め忘れもなくなるため、品質向上だけでなく検査工程での修正工数の削減にも貢献します。
人間の体の構造上、下向きにねじを締めるのはやりやすいですが、横向きや斜めになるとやりづらい傾向があります。また、締められたとしても、ねじ穴に対してねじが斜めになって挿入されることがあります。
しかし、協働ロボットであれば、人間では作業しづらい姿勢でも無理なくねじ締めができます。そのため、ねじ締めのためにワークの姿勢を変えたり、別工程でねじ締めを行う必要がないため、組立作業の工数削減に貢献します。
図の例とは異なりますが、最大トルクや協働ロボットの姿勢など条件がそろえば、上向きのねじ締めも可能です。
協働ロボットが産業用ロボットと大きくことなるのは、適切なリスクアセスメントを行うことで安全柵なしで運用できることです。そのため、導入に際してレイアウトや設置場所のハードルが低いという特長があります。
また、台車の上に協働ロボットを設置することで移動が容易になります。決められた基準点(ランドマーク)を読み取ることで、あらゆる作業環境に素早く適応可能なため、フレキシブルな運用も可能です。
運用面の工夫をすることで、協働ロボットによるねじ締めと、人による作業を同時に行うことも考えられます。
ナットランナを使用することで、トルクと回転角度により管理された高品質なねじ締めができるだけでなく、それらをデータとして蓄積していくことが可能です。
データを蓄積することで、不良発生時の早期発見・早期対応が可能になります。また、OK事例とNG事例を比較することで不良の原因や発生過程を特定し、歩留まり率の改善にも役立ちます。
製造現場においても、今後データを中心とした運用や解析が主流になり、AI活用の場面も多くなるでしょう。その時、蓄積されたねじ締めデータが役に立つ可能性もあります。
 対応可能なねじのトルクは?
対応可能なねじのトルクは?
 ナットランナ単体で0.012Nm~8000Nmまで対応可能です。対応可能なねじの種類は?
一通りの種類に対応しています。ご相談下さい。
多関節ロボット以外のロボットを使用することは可能でしょうか?
可能です。要求仕様に合わせ課題解決に繋がるシステムをご提案させていただきます。
テストや検証などできますか?
可能です。ご希望の場合はご相談ください。
ロボットのカメラでねじの有無検知は可能ですか?
可能ですが、検証が必要です。
ロボットのカメラでねじ穴の位置補正はできますか?
条件によりますので、検証が必要です。
協働ロボットはトルクで停止することはありませんか?
トルクが大きくなるねじ径については停止する可能性があります。その場合、ロボットの可搬を一から検討します。
1つのワークに対してねじの種類が多いです。対応可能でしょうか?
可能です。サイクルタイムに応じて工程分割なども必要になるので、一度ご相談下さい。
複数台でのロボット作業は可能ですか?
可能です。協調作業などが必要になることもあるので仕様を確認させて下さい。
人との同時作業は可能でしょうか?
可能です。ロボットでワークを把持し、作業者がネジ締めすることもできます。ロボット1台でねじ締め以外の作業も対応可能ですか?
ロボットハンドを変更するなどして対応可能です。
仕様は特にありませんが自動化検討をお願いしたいです。
構想から要件定義を検討していきますのでご相談ください。
ナットランナ単体で0.012Nm~8000Nmまで対応可能です。対応可能なねじの種類は?
一通りの種類に対応しています。ご相談下さい。
多関節ロボット以外のロボットを使用することは可能でしょうか?
可能です。要求仕様に合わせ課題解決に繋がるシステムをご提案させていただきます。
テストや検証などできますか?
可能です。ご希望の場合はご相談ください。
ロボットのカメラでねじの有無検知は可能ですか?
可能ですが、検証が必要です。
ロボットのカメラでねじ穴の位置補正はできますか?
条件によりますので、検証が必要です。
協働ロボットはトルクで停止することはありませんか?
トルクが大きくなるねじ径については停止する可能性があります。その場合、ロボットの可搬を一から検討します。
1つのワークに対してねじの種類が多いです。対応可能でしょうか?
可能です。サイクルタイムに応じて工程分割なども必要になるので、一度ご相談下さい。
複数台でのロボット作業は可能ですか?
可能です。協調作業などが必要になることもあるので仕様を確認させて下さい。
人との同時作業は可能でしょうか?
可能です。ロボットでワークを把持し、作業者がネジ締めすることもできます。ロボット1台でねじ締め以外の作業も対応可能ですか?
ロボットハンドを変更するなどして対応可能です。
仕様は特にありませんが自動化検討をお願いしたいです。
構想から要件定義を検討していきますのでご相談ください。

お問い合わせ
ご相談は、下記フォームに必要事項をご入力ください。
入力後、確認ボタンを押してください。