ARH350Aとテックマンロボットのコラボレーション
ASPINAのARH350Aは「しっかりと、いろんなものに、ちょうどいい。」がコンセプトのロボットハンドです。ASPINAはシナノケンシ株式会社のコーポレートブランドで、テックマンロボットとコラボしています。人と一緒に作業できる協働ロボットとして、さまざまな用途に活用できます。
ARH350Aは電動3爪ロボットハンドで、大きな把持力とストロークを実現しています。把持力50Nで3kgまでのワークに対応可能です。モータメーカーならではの中空構造を活かし、エアツールとの組み合わせや、カメラ、センサと組み合わせたソリューションも提案可能です。
また、オプション取り付け面を有しているため、2爪への切り替えも可能であり、「あらゆるものを把持するために」を目指し、 1つのロボットハンドでさまざまなシチュエーションで活用できます。
例えば、やわらかい食品や、試験管などの割れやすい容器、丸いボールや綿棒のような細い棒であってもつかむことができます。
 ASPINAはテックマンロボットのPlug&Playメーカーとして追加されています。Plug&Playとは、協調ロボットTMシリーズに、パートナー企業より提供された容易に接続できるロボットハンドであることを示しています。
ASPINAはテックマンロボットのPlug&Playメーカーとして追加されています。Plug&Playとは、協調ロボットTMシリーズに、パートナー企業より提供された容易に接続できるロボットハンドであることを示しています。
解決できる課題
人手不足や働き方改革によって、人が行う作業を自動化するニーズが高まっています。ARH350Aによって製造業のさまざまな作業を自動化できます。
また、少量多品種生産に対応するためにフレキシブルな生産ラインが求められています。テックマンロボットとARH350Aは、設定変更、段取り替え、レイアウト変更が簡単にできるので少量多品種の生産ラインに対応できます。
ARH350Aの活用方法
ARH350Aを活用することで、製造業におけるさまざまな作業を自動化できます。具体的な活用方法を紹介します。
試験管搬送
人がセットした試験管を搬送できます。
まず、テックマンロボットがTMランドマークを読み取り位置補正を行います。位置補正を行うことで、試験管の正確な位置を把握し正しく把持できます。
また、試験管内部の液体を揺らした後に別の箱にセットすることも可能です。

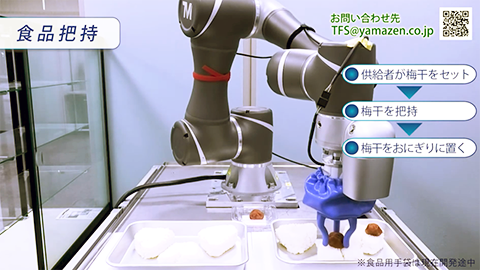
食品把持
ARH350Aは手袋をかぶせるだけで食品把持も可能となります。例えば、おにぎりの製造工程における具材のセットに活用できます。
人が梅干しを置くと、ARH350Aが梅干しを把持します。トレーに並べられたおにぎりに梅干しを順番に置いていきます。
梅干しのような柔らかい食品でも傷めることなく把持できます。具材を並べた後、おにぎりが置かれたトレーを棚に移動させます。
ARH350Aの特徴

3爪電動ハンド
3本の稼働爪を制御し、さまざまなワークを把持できます。大きなストロークと把持力を調整できる点が特徴です。
オートグリップ機能
ワークの形状や硬さに応じて、ロボットハンドが自動で把持力を制御します。
調整可能な把持力
ステッピングモーターを用いたサーボシステムで、開閉動作の速度や位置を制御し、ワークに合わせた把持力を調整できます。
中空構造によるカスタマイズ
ロボットハンドの中心に穴があいている中空構造なので、カメラやエアツールなどを付けることが可能です。
干渉回避
テックマンロボットのカメラにハンドの爪が干渉する場合は、ハンドのフランジを90°回転させて干渉回避できます。
ARH350Aのスペック
ARH350Aは、最大開口径Φ143mm、把持力50Nです。最大つまみ把持重量500g、最大つかみ把持重量3000gとなっています。最大ストローク時の開閉速度は0.8~10secです。
サイズはΦ60×155㎜、最大フィンガー長100mmで重量は640gです。
無負荷時の繰り返し精度±50μmとなっています。

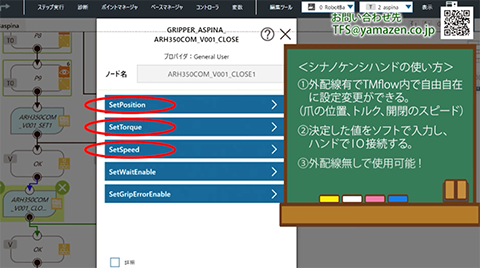
ARH350Aの設定方法
TMflow内で自由自在に設定変更ができます。例えば、爪の位置、トルク、開閉スピードなどをワークに合わせて設定します。
当製品に関するお問い合わせはコンタクトフォームからお願いいたします。