
AIピースピッキングロボットは、製造、物流現場においてワークを自動でピッキングするロボットです。ワークの形状や色、重量、姿勢などがバラバラであっても、AIソフトウェアによって正確にピッキングすることが可能です。
長時間の単調なピッキング作業を人に任せていては労働力が無駄になるだけでなく、ヒューマンエラーを招く可能性もあります。
ピースピッキングロボットを導入することで、省人化、生産性向上、ミス防止を実現できます。


製品紹介
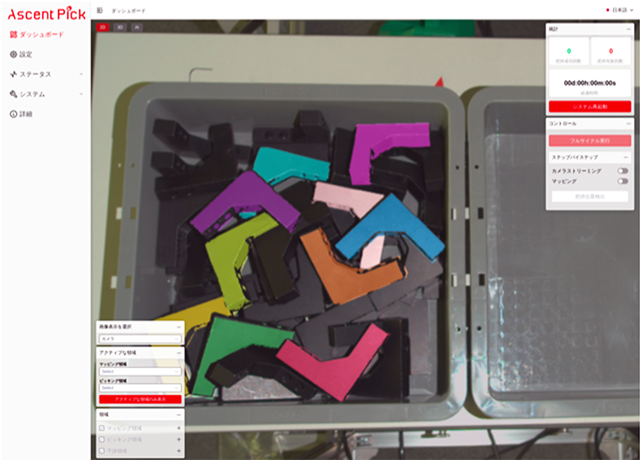
アセントピックは、製造、物流現場においてピースピッキングロボットを制御するAIソフトウェアです。機械学習を取り⼊れた優れた認識エンジンを使⽤しています。
直感的で使いやすいWebベースのUIが特徴です。

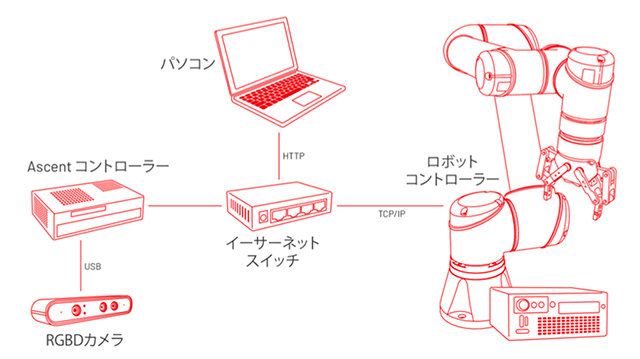
アセントピックを搭載したシステムは、多関節ロボット、RGBDカメラ、アセントコントローラー、ロボットコントローラー、パソコンから構成されます。


明度の変化など外乱に強く、さまざまな材質・形状のワークを安定して把持できます。
機械学習ベースの認識エンジンによって、大幅にワーク認識時間を短縮しています。

機械学習のために大量の画像データをAIに読み込ませますが、データの収集およびラベル付けの手間が不要です。ワークをスキャンして生成する3Dモデルを元に、さまざまな画像データを自動生成してAI学習を完了します。
AIソフトウェア「アセントピック」には以下の主要機能が搭載されています。
| ワークの把持位置出力 | ワークの配置 | 直感的で使いやすい画面 |
|---|---|---|
| 機械学習ベースの優れた認識エンジンを使用することで複雑・特殊な形状のワークを認識します。 そしてAIが「ワーク同士」「ワークとハンド」「ハンドと箱」などの干渉を回避した把持位置を検出します。 |
認識エンジンがワークの現実世界での正確な位置姿勢を検出することで、ワークを決められた位置姿勢に精度高く配置することが可能です。 | PCの画面を使用し、システムの設定および稼働中のシステムの状態監視が可能です。 設定完了後は画面を使う必要はありませんが、状態監視画面はシステムの微調整等に便利です。 |
| ワークの把持位置出力 |
|---|
| 機械学習ベースの優れた認識エンジンを使用することで複雑・特殊な形状のワークを認識します。 そしてAIが「ワーク同士」「ワークとハンド」「ハンドと箱」などの干渉を回避した把持位置を検出します。 |
| ワークの配置 |
| 認識エンジンがワークの現実世界での正確な位置姿勢を検出することで、ワークを決められた位置姿勢に精度高く配置することが可能です。 |
| 直感的で使いやすい画面 |
| PCの画面を使用し、システムの設定および稼働中のシステムの状態監視が可能です。 設定完了後は画面を使う必要はありませんが、状態監視画面はシステムの微調整等に便利です。 |
さまざまな形状や質感の対象物をピッキング処理することが可能です。作業風景を動画でご覧ください。
ピースピッキングロボットが、箱に入れられたボルトをミリ単位の精度で把持して同じ向きで並べています。
表裏のあるリング形状の金属部品を把持して仕分けています。リングの内側にロボットハンドを入れ、ハンドを広げて内側から把持します。表裏を区別して仕分けしています。
バラバラに入れられたプレート形状のワークを吸着して種類ごとに仕分けています。穴の位置の違いにより表裏がありますが、正確に識別し仕分けると共に、3点の治具に配置できるよう正確に回転しています。
お菓子やパック飲料などの食品をロボットが、バーコードの位置を認識した上でピッキングし、箱に仕分けしています。商品を吸着した後、バーコードをリーダーに向けてスキャンしてから箱に入れていきます。
専用のロボットハンドを使い果物を吸着するので痛めることなく把持できています。カメラで撮影した画像を解析して、リンゴとミカンを認識して梱包箱に置いていきます。
野菜のような不定形なものもピッキングできます。キュウリのような細長い形の野菜も傷めることなく丁寧に把持して運ぶことができます。
対象物を正確に捉える認識AIトレーニングのためには、3Dモデル生成技術も重要です。
アセントでは3D CADデータがない対象から高品質のデジタルツイン・データを自動生成するサービスを提供しています。そのデータはロボットピッキングのためのAI学習に使用されるだけでなく、高解像度3Dモデルとしてマーケティングやメタバースに活用していただけます。
アセントのデータ自動生成技術を利用することで、人手による作業をほとんど必要とせず、実データを迅速に収集できます。
AIトレーニングに必要な面法線、粗さ、重心など対象物の特徴は、自動化されたパイプラインによって計算し抽出されます。重心や曲率などを正確に再現し、ワークのどの部分を把持するかを決定しています。
1. ワークの決定
ピッキングを自動化したい対象物の種類や要件をヒアリングし、ワークを決定します。
2. ロボットハンドの決定
ワークの把持に最も適したロボットハンドを選定します。
3. CADデータ提供(ワーク、ハンド)
ワークおよびロボットハンドのCADデータを提供していただきます。CADデータがない場合にはワークを3Dスキャンをしてデジタルツインデータを生成します。
4. AIトレーニング
ラベル付けされたデータを人が用意する必要はなく、3Dモデルをもとに光環境や背景などをランダムに組み合わせてさまざまなデータを作り出します。AIロボットがワークの位置や姿勢を正しく認識するために、RGBの色情報や質感も含むデータを使ってAIを教育します。
5. ロボット、周辺機器の選定・準備
ロボット、ロボットコントローラー、RGBDカメラ、アセントコントローラー、パソコンを選定し準備します。
6. 現地システム調整
実際に使う現地にてロボットおよび周辺機器を接続し、ロボットの設定、カメラ設定、AIモデルの設定などをします。把持する位置を正しく認識できているかを確認します。
7. ピッキング開始
ロボットによる自動ピッキングを開始します。これまでのティーチングを必要とするピッキングロボットとは比較にならない短時間でここまでの工程を完了します。

お問い合わせ

